Building¶
Introduction¶
Bulebule is an open and freely distributed micromouse design. If you plan on starting your own micromouse, you may consider at least having a look at how it is built for reference!
Most of the components are easy to find, easy to solder and cheap. The only exception are the motors, which we found second-hand but otherwise could be really expensive.
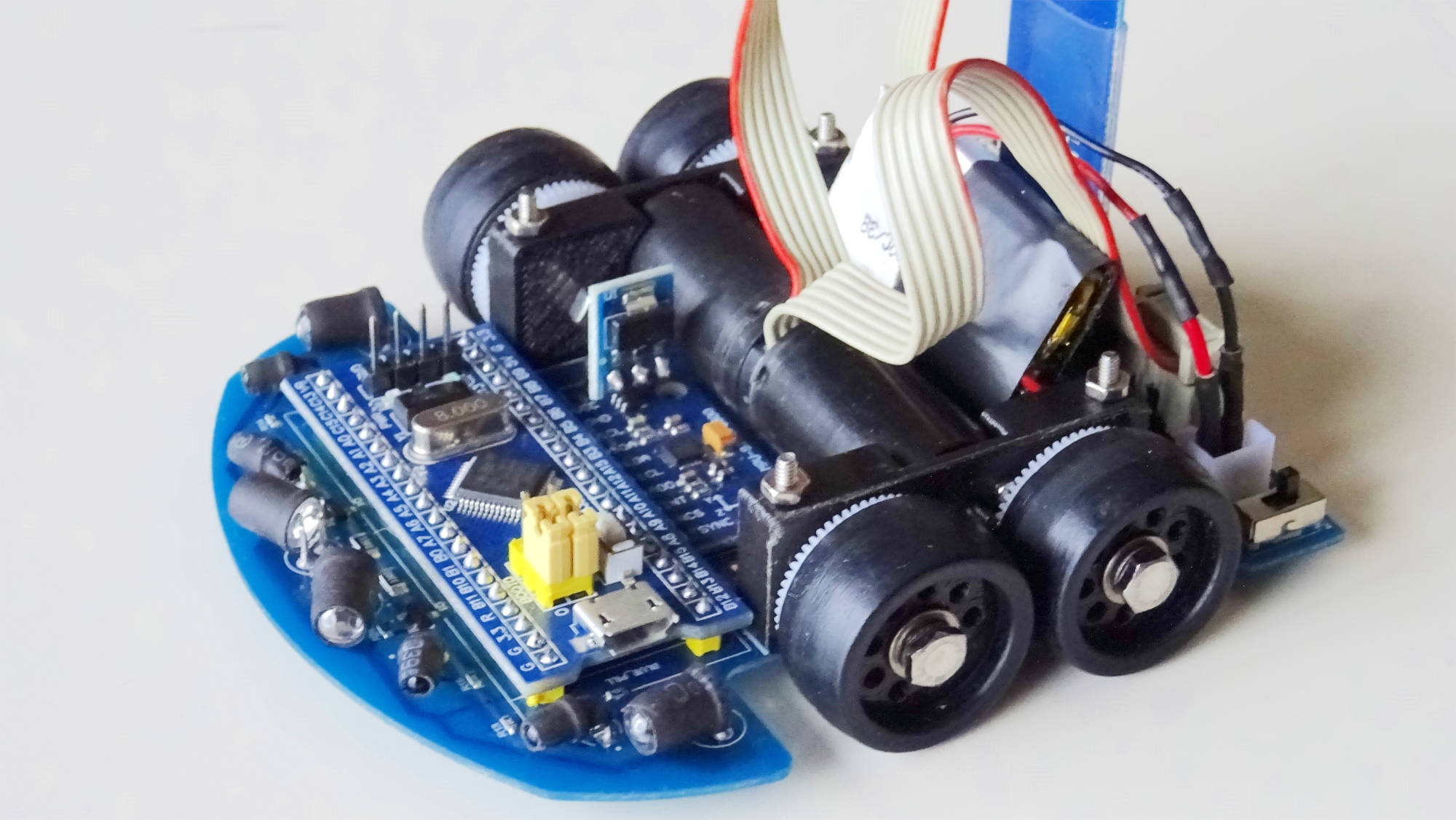
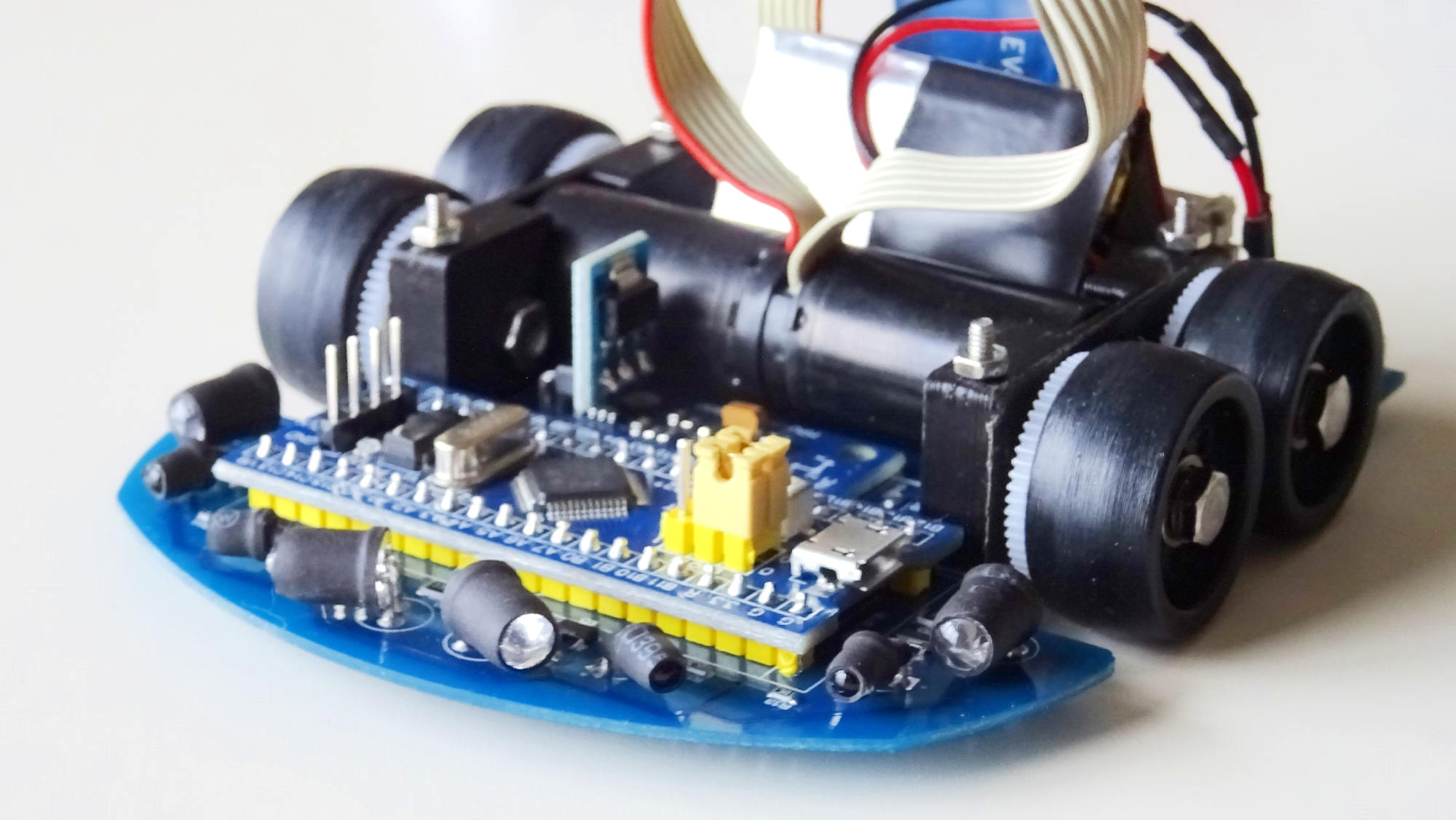
Bulebule micromouse.¶
If you build your own Bulebule, even if it is an exact copy, share your work! It will help others even if only by encouraging them to build their own. 😊
If you make modifications and end up with a new version, perhaps with cheaper motors, different sensors or whatever you come up with, share your work too! 😍
Board¶
Design¶
The board design is published under a Creative Commons Attribution-ShareAlike license 2.
You can check more details like the list of materials and the Gerber files in the Bulebule Upverter project page 1.
Soldering¶
Note
You may want to read the full soldering instructions before starting to solder your first component.
The board, which is the base of the robot, is a simple 2-layer PCB. Most of its components are through-hole, which means they should be easy to solder.
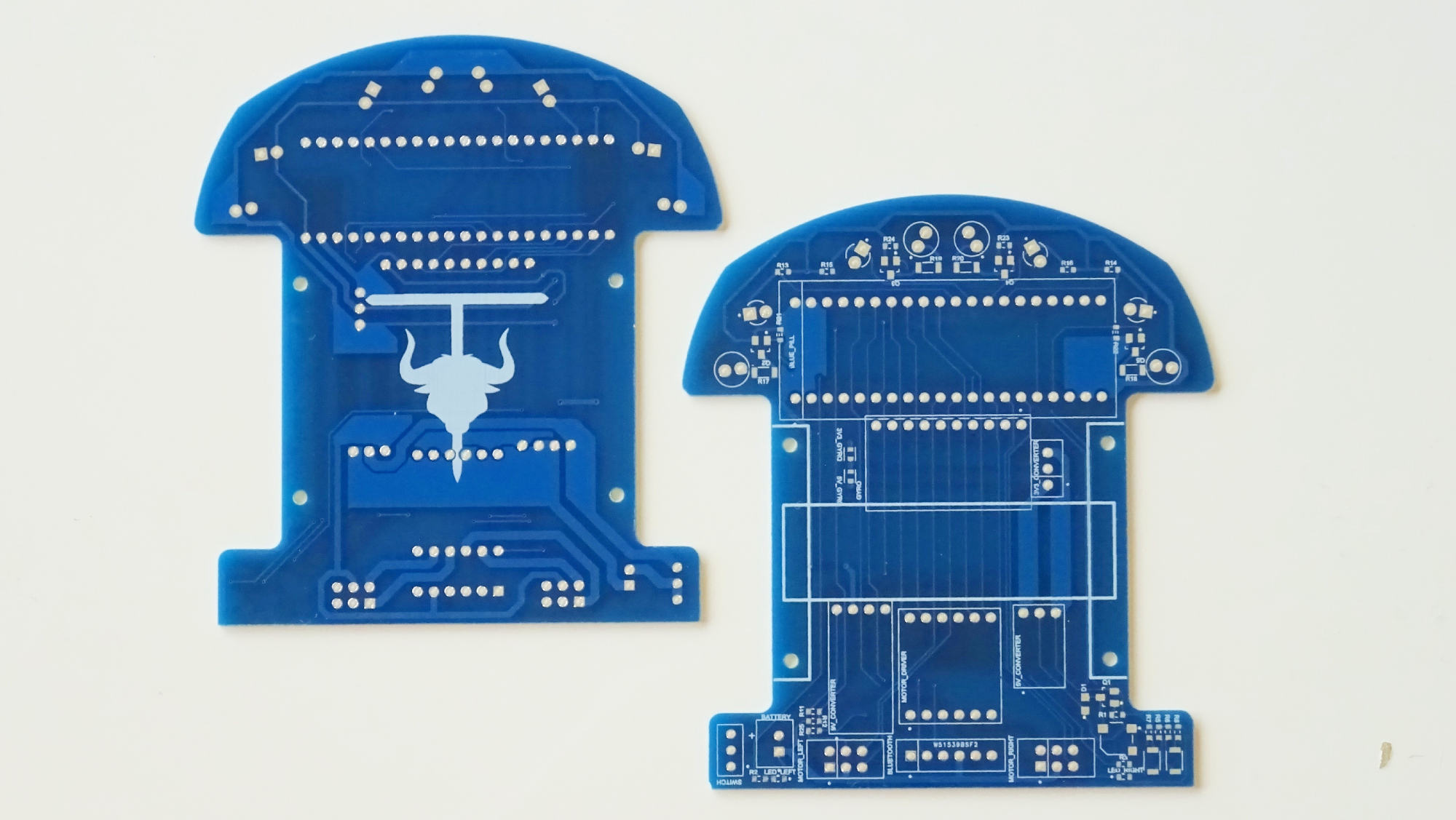
Bulebule PCB.¶
You should start by soldering the smallest (SMD) components first: resistors, capacitors, MOSFETs, LEDs, switches, diodes and the speaker.
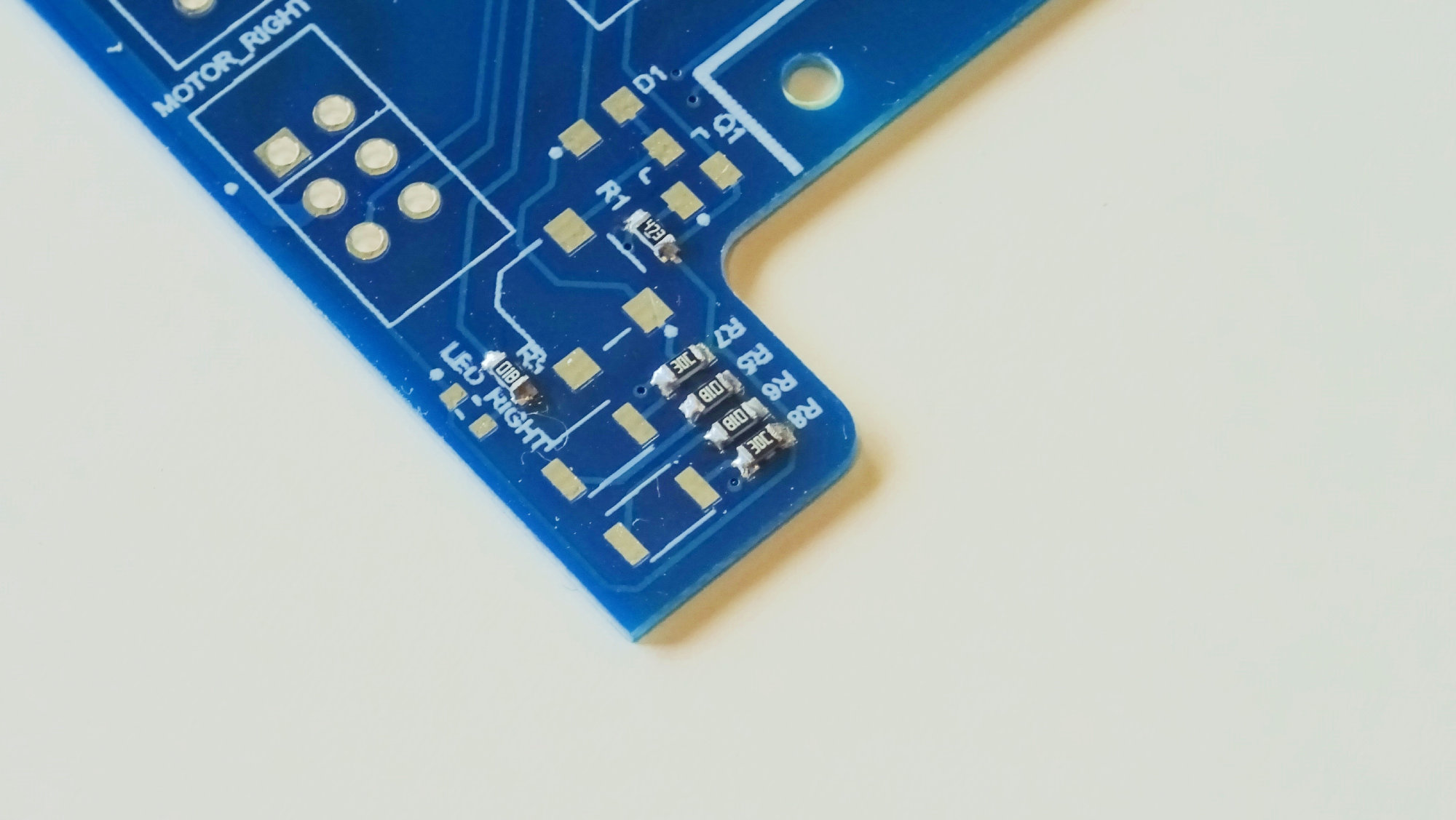
Always start with the smallest components.¶
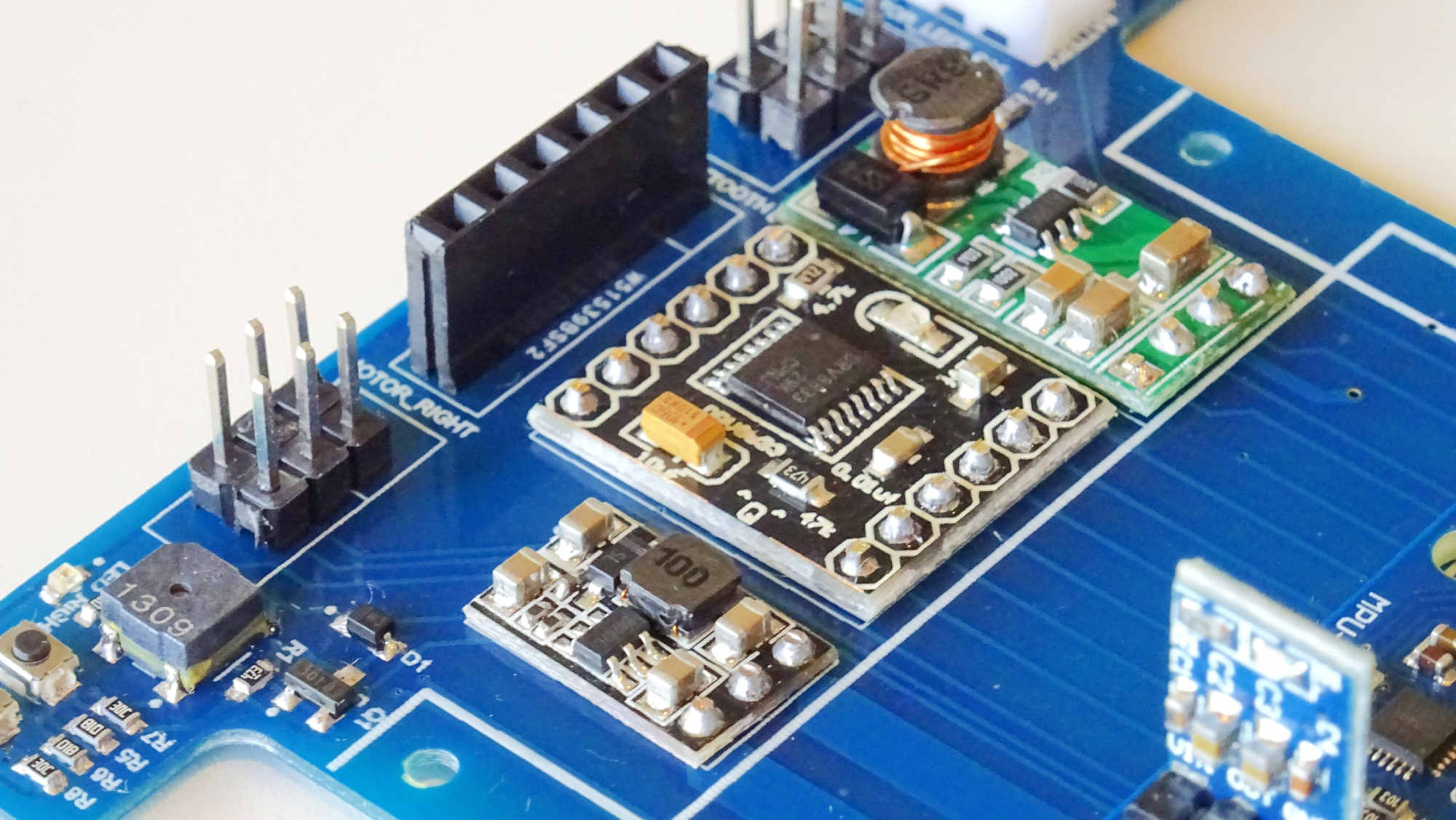
When you are done with the SMD components, you may proceed with all the on-board modules like the motor controller, the DC-DC converters and the gyro.
Among them, you only need to take special precaution with the gyroscope board, which should be soldered with (virtually) no separation between the base PCB and the module. This is to be able to solder the microcontroller board afterwards.
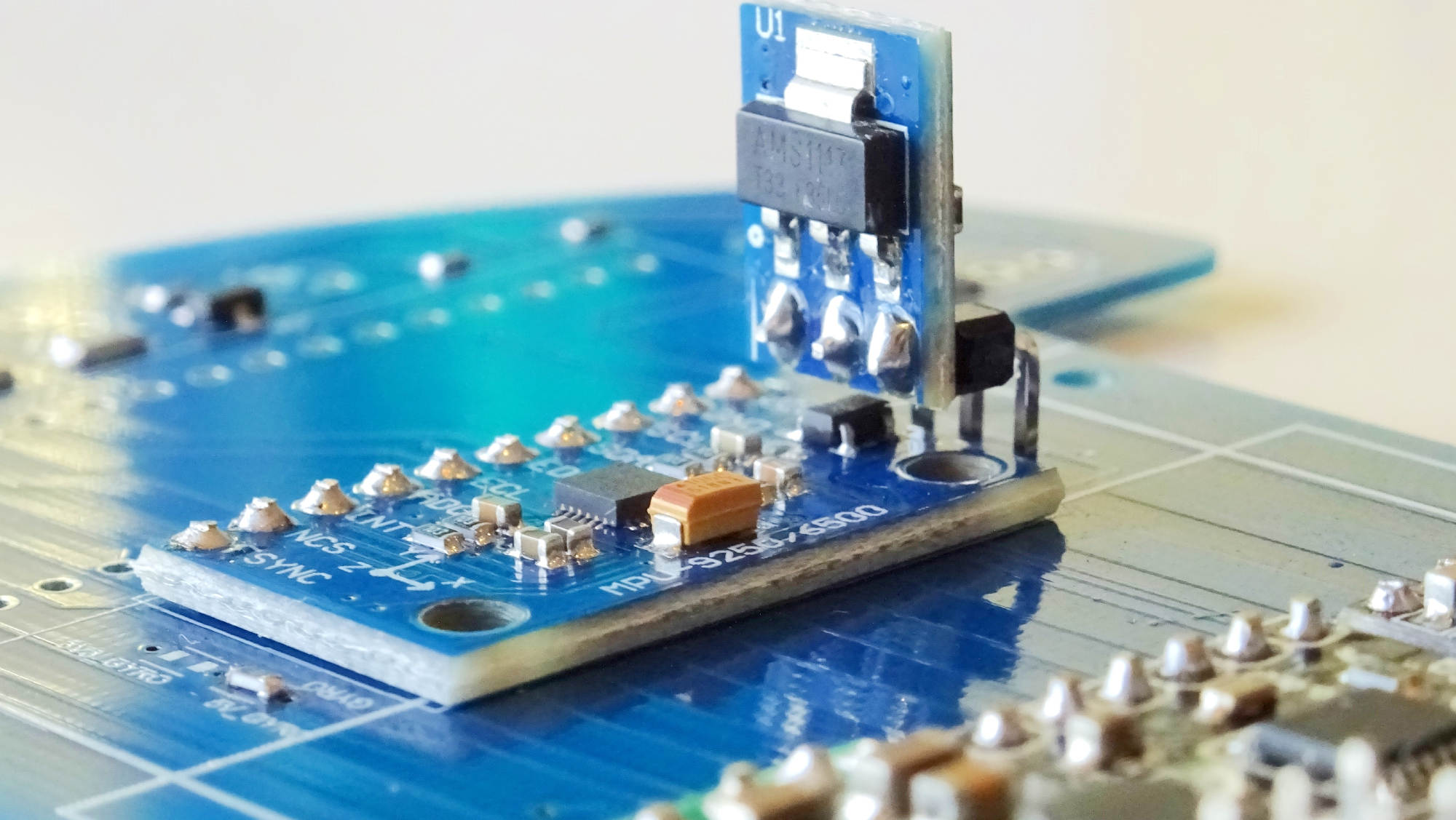
The gyroscope needs to be soldered with “no separation” from the board.¶
You can do the same with other on-board modules, but it is no necessary nor really recommended unless you really feel comfortable with soldering.
Proceed to solder other modules and the pin headers too.¶
Before we solder the Blue Pill 11, we need to make sure we desolder one little resistor from the back of the board. In particular, the R10 resistor, connected to the USB on the board, which we will not be using.
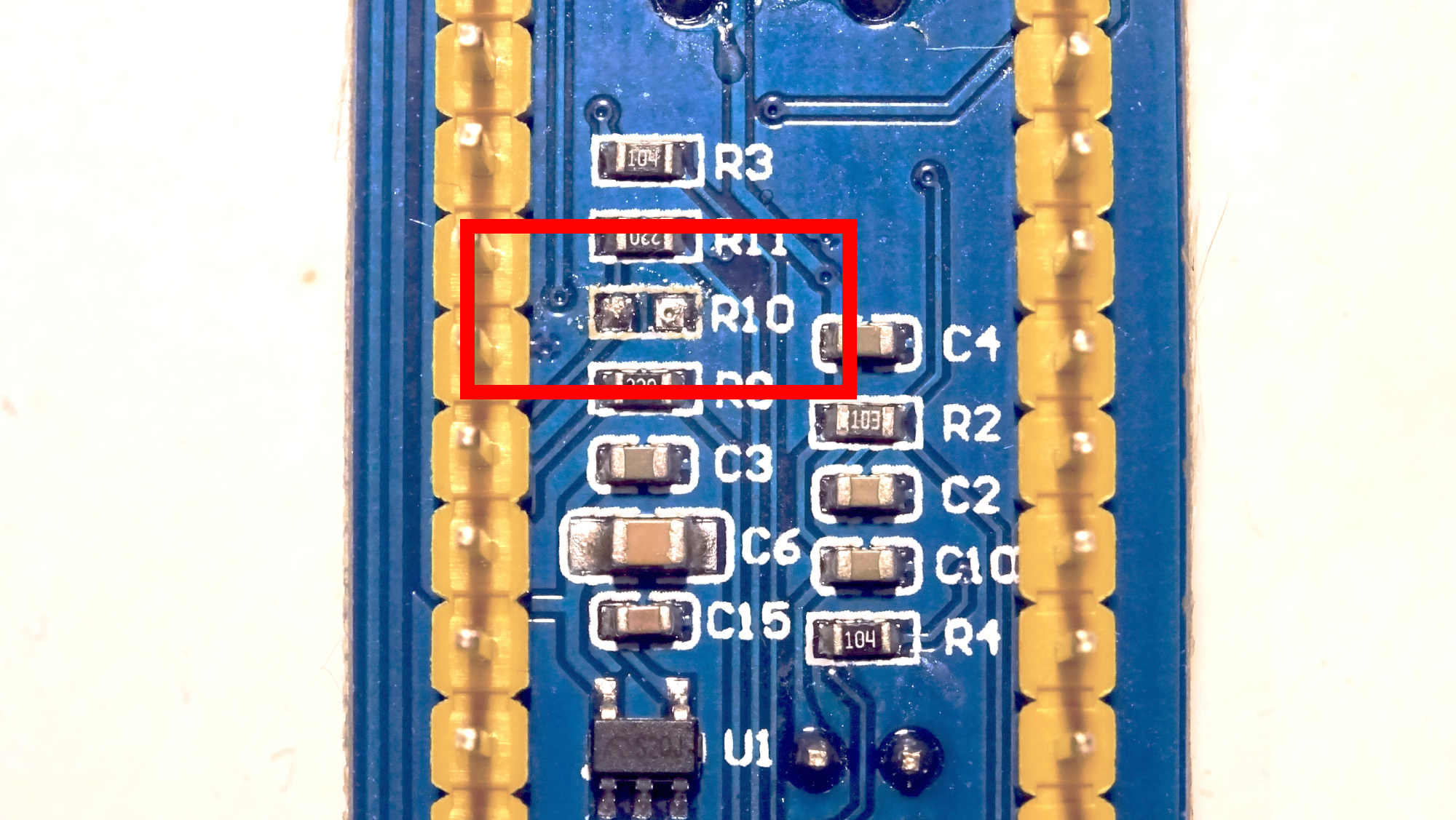
Remove the R10 resistor from the microcontroller board.¶
We would recommend you to desolder the microcontroller programming pins (in a horizontal position) and solder new ones in a vertical position instead, to ease connection when programming.
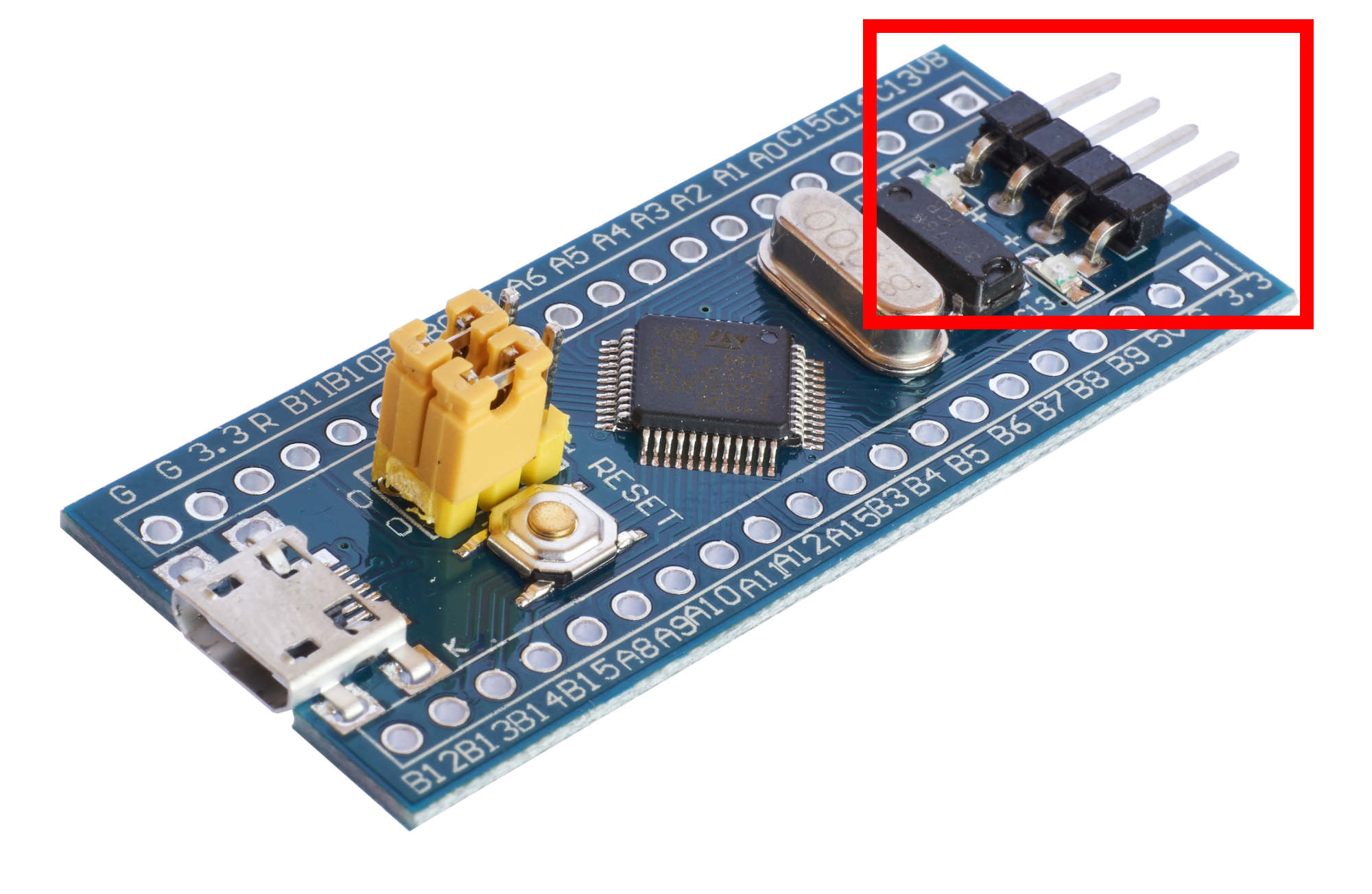
Replace the horizontal programming pins with vertical pins instead.¶
Last, but not least, you should cover the emitters and receivers with some heat-shrink tubing to increase precision in your readings. Only then, proceed to solder them on to the board.
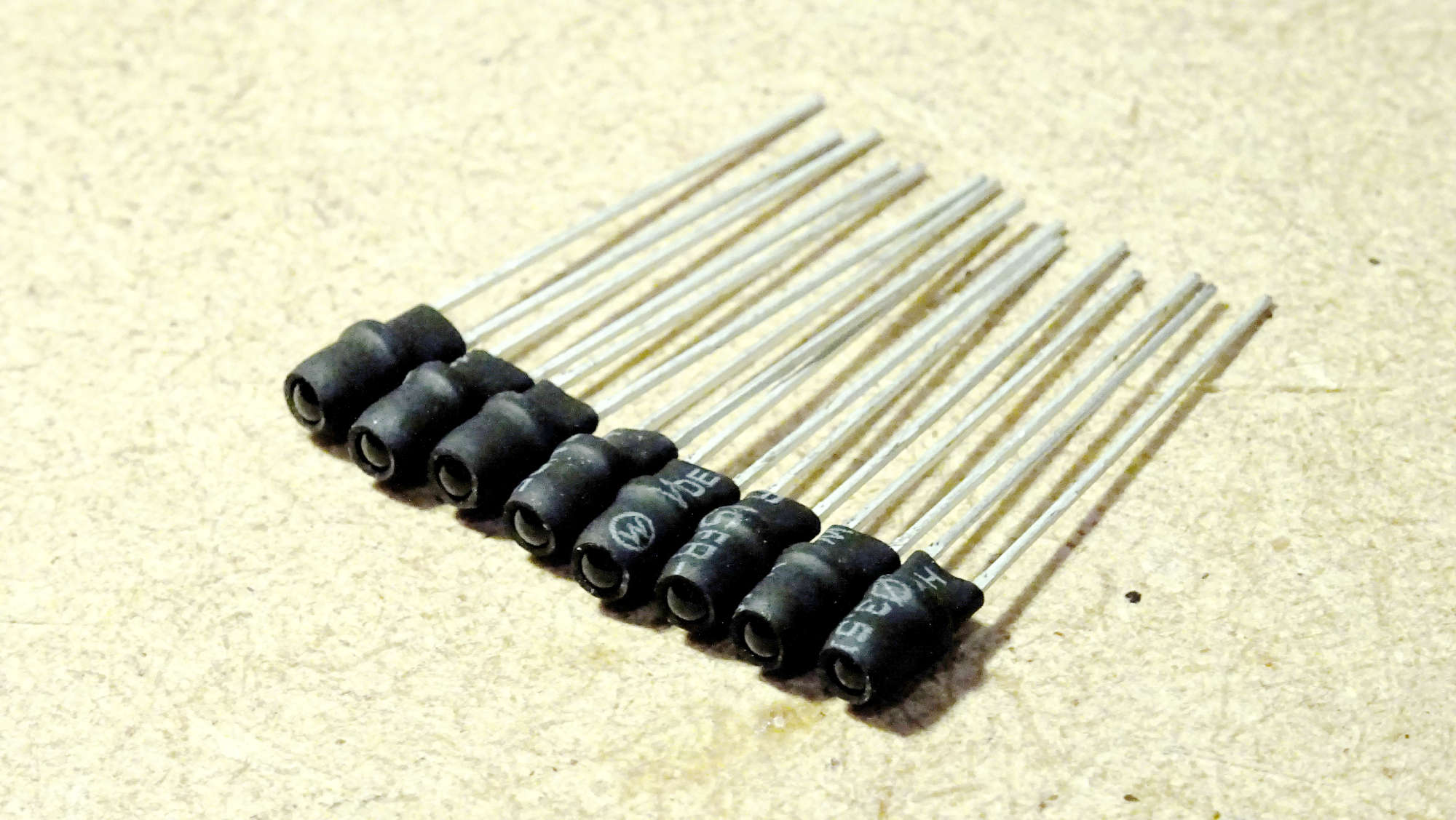
Cover the emitters and receivers with heat-shrink tubing.¶
Solder them horizontally (or parallel to the board/floor) so that they point to the walls when solving the maze!
Solder the emitters and receivers horizontally and close to the PCB.¶
Locomotion¶
Motors and encoders¶
The motors are a pair of Faulhaber 1524B009SR 4, which have the following basic characteristics (at 22ºC and nominal voltage):
Name |
Value |
Unit |
|---|---|---|
Diameter |
15 |
mm |
Length |
24 |
mm |
Nominal voltage |
9 |
V |
Terminal resistance |
10.6 |
Ω |
No-load speed |
10000 |
rpm |
No-load current |
0.009 |
A |
With the following rated values for continuous operation:
Name |
Value |
Unit |
|---|---|---|
Rated torque |
2.9 |
mm |
Rated current |
0.38 |
A |
Rated speed |
4500 |
V |
The motors have attached IE2-512 quadrature encoders 5, with 512 lines per revolution.
Design¶
We are following a Tetra locomotion design 9. The motors we have found come with a pinion attached to the shaft. The pinion has a 4.5 mm reference diameter and 15 teeth, which means it has modulo 0.3.
Taking into account the target robot size, the design restrictions and also the availability of tires and gears in local hobby/slot shops, we decided to go with:
60 teeth gears 7 (18 mm reference diameter and less than 19 mm external diameter).
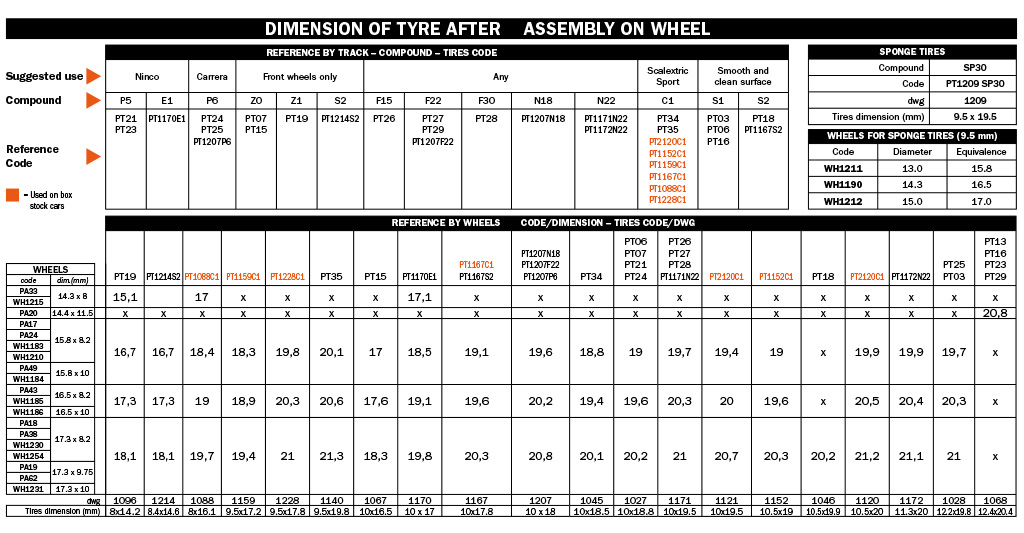
20 mm tires (Slot.it PT18 8; suitable for smooth and clean surfaces).
Bearings and axis¶
The bearings are some MR63ZZ 6 (3 mm inner diameter, 6 mm outter diameter and 2.5 mm width).
Rim¶
The rim has been designed with CadQuery 3. See the Bulebule 3D designs 10.
Mounting¶
The mounting has been designed with CadQuery 3. See the Bulebule 3D designs 10.
Assembly¶
In order to assemble the locomotion system, we first need to make the wheels. Starting from making a hole in the center of the gears that should be bigger than the bearings. The hole should be centered for stabilization purposes, but it is really not critical.

Make a hole in the center of the gears.¶
Once you have the gears ready, you need to insert a pair of bearing in the rim, one on each side. Using flanged bearings may help here. Put the tire around the rim and then proceed to carefully glue the gear to the rim with some epoxy.
The gear must be centered with respect to the rim. While the epoxy is hardening, make sure to rotate the wheel (put an M3 screw in the bearings to make the wheel rotate easily) and ensure there are no deviations.
This glueing process is very delicate. You will have just a couple of seconds to make effective corrections on the gear position, while the epoxy is hard enough to maintain any corrections you apply but not completely solid.

Insert a pair of bearings in the rim and glue the gear to the rim.¶
Finally, use some M3 screws to attach the wheels to the mount. Put a nut in between the wheel and the mount, that will help separate the gear from the mount.
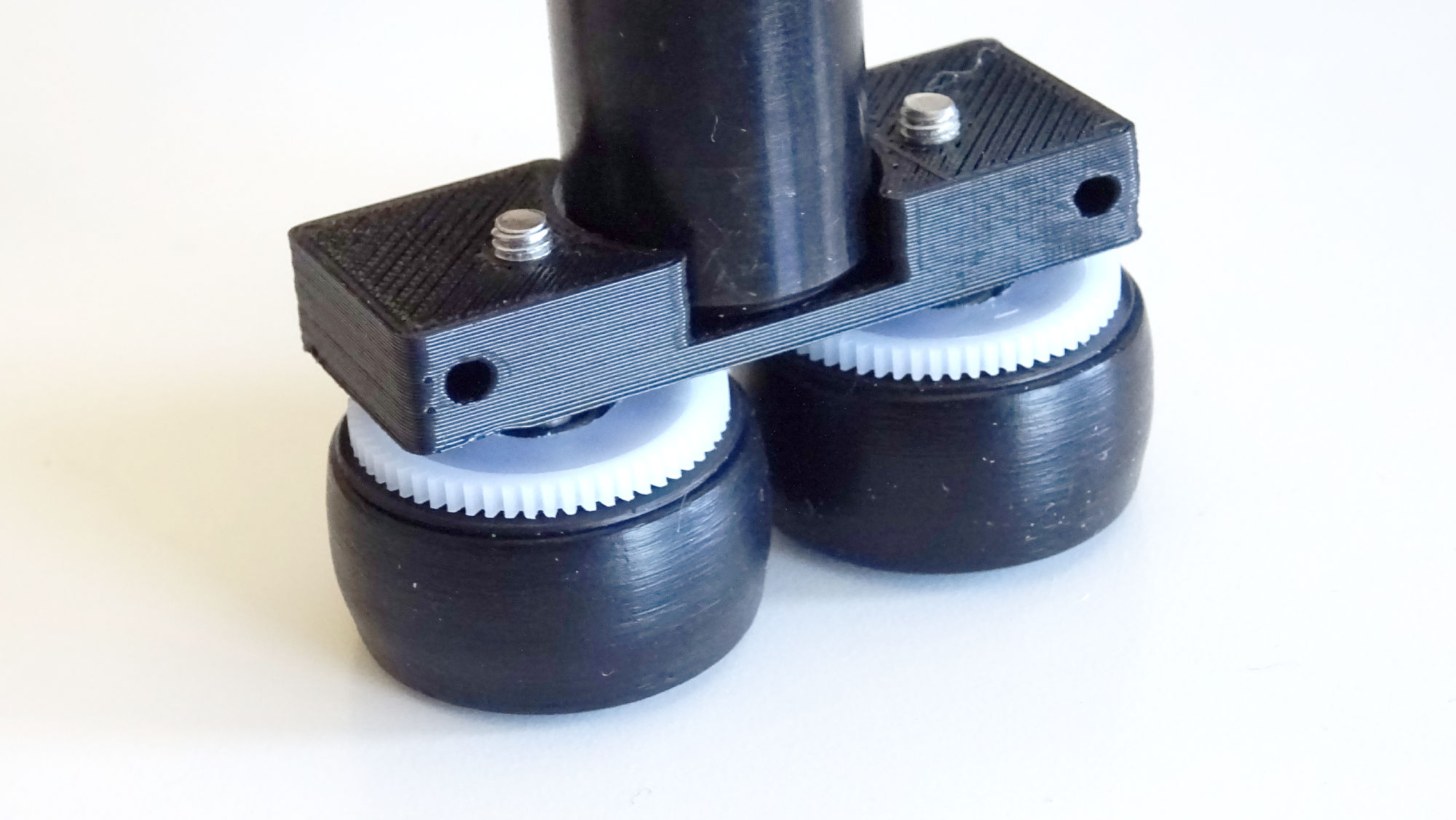
Une an M3 screw to attach the wheels to the mount.¶
Then put another nut at the other (inner) side of the mount and tighten it. The two nuts will make a sandwich with the mount and make sure the screw does not move.
Finally, attach the mount to the PCB with some M2 screws.
Attach the mounts to the PCB with some M2 screws and you are done!¶
Congratulations! Now you should be ready to try your micromouse! 🎉
References¶
- 1
- 2
- 3(1,2)
- 4
https://www.faulhaber.com/fileadmin/Import/Media/EN_1524_SR_DFF.pdf
- 5
https://bulebots.readthedocs.io/en/latest/ie2-1024_encoder_family.html
- 6
http://www.rcbearings.com/products/mr63zz-3-x-6-x-2-5-bearing.html
- 7
http://www.mootio-components.com/engranajes-de-plastico/modulo-0.300/dientes-60z
- 8
http://slot.it/immagini/KitPart/tires/Slot-it_tabella-2015.jpg
- 9
- 10(1,2)
- 11
https://web.archive.org/web/20190524151648/https://wiki.stm32duino.com/index.php?title=Blue_Pill

{kind=link}